KS Frequenzumrichter
Komplexe Prüfaufgaben lösen
Durchdachten Systemlösungen in der Motoren- und Antriebsstrangprüfung.
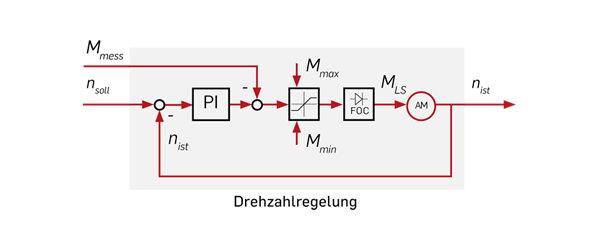
Der KS R2R Frequenzumrichter ist Bestandteil der KS Hochleistungsprüftechnik für komplexe Prüfaufgaben. Neueste Halbleitermodule kombiniert mit schneller Signalverarbeitung und ganzheitlicher modellbasierter Regelungstechnik ermöglichen hochdynamische Anwendungen. Über mathematische Modelle des Prüfstands und seiner Komponenten sowie modernste Regelungsalgorithmen wird ein Höchstmaß an Regelgüte erreicht. Diese Systemlösung ist der Schlüssel für bisher nie da gewesene Ergebnisse in der Motoren- und Antriebsstrangprüfung.